Anki Vector 2 0 · Volume 3
Hardware Architecture & Sensor Suite
3.1 A closed machine, documented from outside
Vector was designed as a sealed consumer device. No public service manual was released; no factory spec sheet accompanied the product. What follows is therefore built from two categories of evidence: confirmed facts, meaning those stated by a reachable primary source or by multiple independent secondary sources in agreement; and unverified facts, meaning those reported by a single secondary source, by community reverse-engineering, or by aftermarket evidence. Items that no reachable source addresses at all are treated as not found and left explicitly unclaimed rather than estimated.
The 543-page Vector Technical Reference Manual (randym32.github.io/Vector-TRM.pdf)
was located and downloaded as a 6.7 MB file, but was not text-extractable in the
environment used to compile the gated fact base — it is explicitly flagged as the most
likely route to confirmed RAM, storage, time-of-flight range, and battery mAh figures if
a later pass with PDF-extraction tooling revisits it (vector_sourcing_notes.md). Until
that pass, those four specifications remain unclaimed in this volume.
The confirmed/unverified split is made visible throughout and condensed in the summary table at the end.
3.2 Compute platform
3.2.1 The Qualcomm Snapdragon APQ8009
The CPU is a Qualcomm Snapdragon APQ8009, a quad-core ARM Cortex-A7 running at 1.2 GHz. This identification is community-confirmed — the community technical wiki and independent spec aggregators converge on the APQ8009 — but it does not appear in any factory document reachable for this dive (thedroidyouarelookingfor; wevolver; Kinvert). It is sourced from community teardown and reverse-engineering, not from an official Anki or DDL release.
UNVERIFIED clock detail: the chip is reported by one community source to run at a default of 533 MHz with an unlocked ceiling of approximately 1.3 GHz; this figure comes from a single teardown account and should not be treated as confirmed (thedroidyouarelookingfor).
The Snapdragon 200 family, to which the APQ8009 belongs, is a low-power mobile-class SoC. The “APQ” designation indicates an application-processor part without an integrated modem, consistent with Vector’s separate Wi-Fi module carrying the wireless function. The quad-core Cortex-A7 topology gives the robot four symmetric cores for running real-time perception, navigation, face tracking, and animation simultaneously — the architecture that allows Vector to react to its environment, maintain its charging-dock awareness, and animate its face without any cloud assistance for those functions. Voice intent, however, was a cloud function; that split is covered in Vol 4.
3.2.2 Operating system
The software base is Yocto / embedded Linux — a custom embedded OS built on the Yocto Project’s layer-based toolchain (thedroidyouarelookingfor; wevolver). This gives Vector a POSIX-like filesystem and process model despite its consumer-product enclosure. The wire-pod local server and OSKR bootloader both depend on this Linux substrate, and the community Python SDK communicates with an onboard process stack that runs as standard Linux services. Community notes describe the storage layout as “Android-like” in partition structure; beyond that, the internal filesystem layout is not documented in any reachable source.
3.2.3 RAM and storage
Neither RAM capacity nor storage size appears in any source reachable for this dive. The
gated fact base (vector_sourcing_notes.md) explicitly marks both as NOT FOUND and
places them on the do-not-assert list. Community discussion refers to “an Android-like
partition table” and a Yocto Linux userspace, but no numeric figure has been confirmed
by a primary source. The Technical Reference Manual is the anticipated route to these
numbers.
3.3 Camera and display
3.3.1 Camera
The camera embedded in Vector’s “face” serves both the machine-vision functions (face detection, motion tracking, object recognition) and the user-facing photo and video capability. For Vector 2.0, the specification is confirmed: a 2 megapixel sensor with a 120° ultra-wide field of view (anki.bot; wevolver; ankicozmorobot). The 2.0 hardware revision specifically upgraded the camera from the original unit (ankicozmorobot).
CONFLICT on the original camera: the original Vector’s camera is described as “HD” / 720p by some sources and as 1080p by at least one other (wevolver; one search snippet — that 1080p attribution is a single secondary source, UNVERIFIED). Because the 2.0’s 2 MP / 120° spec is clearly established by multiple independent sources and the original’s exact resolution is genuinely disputed, this dive does not resolve the conflict; both attributions are recorded for the reader.
The exact camera sensor part number is not found in any reachable source.
3.3.2 Display
Vector’s front panel is a high-resolution color IPS display — confirmed by the vendor and by multiple independent product descriptions as the “face” through which Vector expresses its animated personality and eye graphics (anki.bot; iFixit).
Resolution: UNVERIFIED. A single teardown source (Kinvert) reports 184 × 96 pixels; no other reachable source confirms this figure. DDL’s marketing materials describe only “High-Res Color IPS” without stating a pixel count. The 184 × 96 figure is therefore flagged as unverified — a community-teardown observation, not a confirmed specification — and should not be quoted as fact without a further primary source.
3.4 Sensor suite
Vector’s sensing capability is dense for a consumer robot of its size. Six distinct sensing modalities are confirmed by reachable sources; range and absolute performance figures for most of them are community-aggregated or simply absent from all reachable sources.
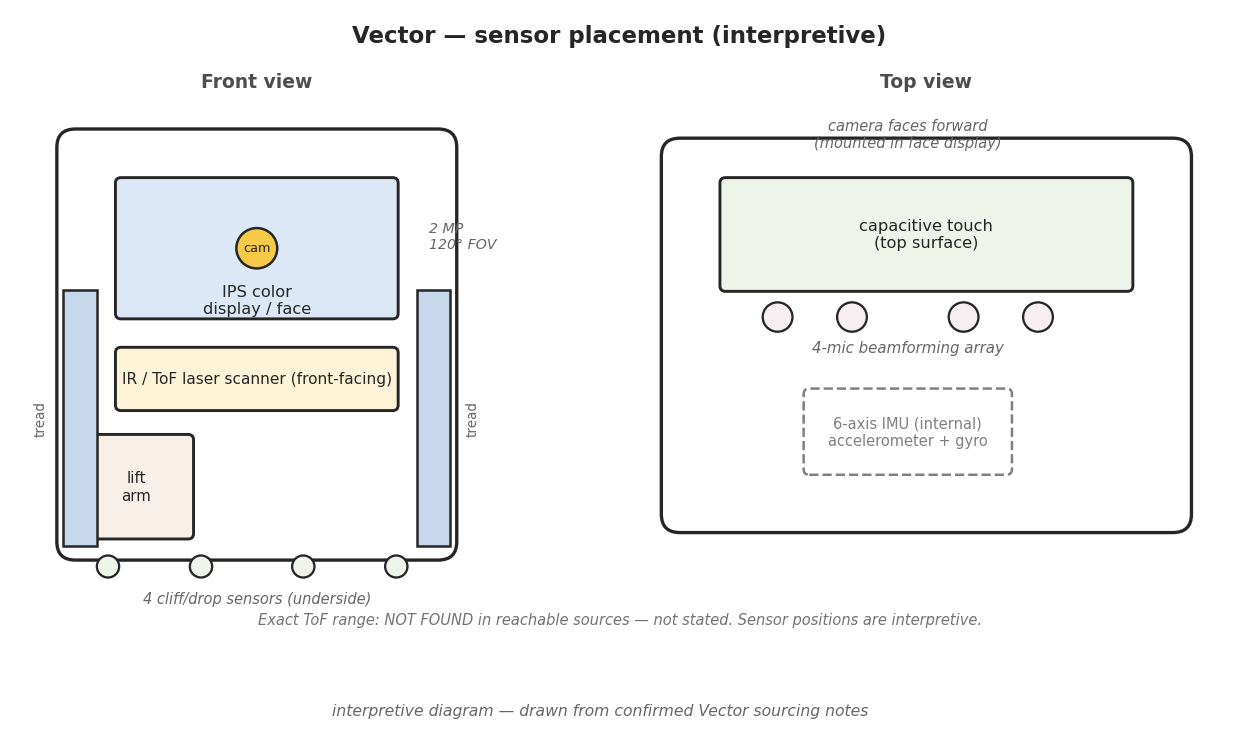
3.4.1 IR / ToF laser distance scanner
An infrared time-of-flight (ToF) laser distance scanner is mounted in Vector’s front face (wevolver; anki.bot). Product materials describe it as an “Infrared Laser Scanner.” Its function — sweeping the space in front of the robot to detect obstacles and measure proximity — is central to Vector’s desk-territory navigation and to its responses when objects approach its face.
Range: NOT FOUND. No reachable source states the ToF sensor’s effective range, minimum detectable distance, or angular sweep. The Technical Reference Manual is the most probable source for this specification; it remains unclaimed here.
3.4.2 Four cliff / drop sensors
Vector carries four infrared cliff / drop sensors mounted around the underside of its chassis (wevolver; iFixit). Their purpose is to detect table or desk edges before the robot rolls off — a critical autonomy function for a machine that wanders untethered on elevated surfaces. Four sensors are confirmed; the exact reflectance technology and detection threshold are not stated in any reachable source.
3.4.3 Capacitive touch sensor
The top surface of Vector’s body includes a capacitive touch sensor that detects petting, tapping, and physical interaction (wevolver; iFixit; anki.bot). Touch events trigger behavioral responses — surprise, happiness, or irritation depending on context — and are part of the robot’s expressive personality loop. The touch surface is described in community materials as a single zone; whether this is a hardware constraint or a firmware choice is not stated in any reachable source.
3.4.4 Four-microphone beamforming array
Vector uses a four-microphone beamforming array for wake-word detection and voice-command capture (wevolver; anki.bot). Beamforming enables directional audio processing: the firmware can estimate the direction of the speaker and focus pickup toward it while suppressing ambient noise. This hardware is what makes the wake phrase “Hey Vector” reliable in typical room conditions without requiring the user to stand directly in front of the robot. Four microphones are confirmed across multiple sources; exact microphone part numbers and the beamforming DSP implementation are not stated in any reachable source.
3.4.5 Six-axis IMU
A six-axis inertial measurement unit — accelerometer plus gyroscope — is embedded in Vector’s chassis (wevolver; Kinvert). The IMU provides the robot’s self-motion awareness: detecting whether it is being picked up, carried, placed down, or experiencing an unexpected collision. It also feeds the onboard navigation and animation systems, allowing smooth behavioral transitions as the robot’s physical orientation changes. Part number and full-scale ranges are not stated in any reachable source.
3.5 Mobility: motors, treads, and lift arm
Vector’s ground contact is via two rubber-treaded tracks driven by DC motors (wevolver; Fictiv teardown). Community teardown analysis identifies approximately 45-tooth internal drive gears in the tread mechanism (wevolver; Fictiv). The tread design provides good grip on smooth desk surfaces and allows pivot-in-place turns for rapid direction changes without a differential steering mechanism.
A forklift-style lift arm at the front of the chassis raises and lowers; it serves as Vector’s primary physical manipulator. The companion cube is sized to fit the lift arm, and interacting with it is one of Vector’s core autonomous behaviors. The lift arm is DC-motor-driven; exact gear ratios and lift travel distance are not stated in any reachable source.
Dimensions and weight: NOT FOUND. Frequently-cited figures of approximately 3.9 × 2.4 × 2.7 inches and ~159 g do not appear in any source reachable for this dive and are treated as UNVERIFIED until a primary source — most plausibly the Technical Reference Manual — confirms them (vector_sourcing_notes.md).
3.6 Connectivity
3.6.1 Wi-Fi
Vector connects to a home network via Wi-Fi 2.4 GHz single-band (wevolver; anki.bot). This is the link through which the original cloud voice stack operated, and through which wire-pod communicates with the robot in the community revival setup. No credible Wi-Fi 6 (802.11ax) claim appears in any reachable source; none is asserted here. The 2.4 GHz band constraint means Vector does not join 5 GHz networks — a practical consideration for home setups where the 5 GHz band is preferred.
3.6.2 Bluetooth
Bluetooth is used for the initial pairing and network-configuration step (wevolver; anki.bot; wire-pod wiki: Installation). Once the Wi-Fi credentials are provisioned, Bluetooth is not the active channel for normal operation. The wire-pod installation documentation notes that a Bluetooth-capable device is required on the host side for the initial connection step.
3.7 Power: battery and charging dock
3.7.1 Battery
Vector is powered by a lithium-polymer battery with a confirmed runtime of approximately 30 to 40 minutes under normal use (thedroidyouarelookingfor; community aggregators). The robot autonomously returns to its charging dock when the battery runs low; this dock-return behavior is part of the base firmware and does not depend on the cloud stack.
Capacity: UNVERIFIED. Aftermarket replacement battery listings and community refurbishment notes cite capacities of approximately 500 mAh at 3.7 V; one refurbishment source mentions 600 mAh. No factory-specified capacity appears in any reachable primary source. These aftermarket figures are plausible — a sub-1 Wh cell is consistent with the 30–40 min runtime at the power levels a Cortex-A7 SoC plus motors would draw — but they remain unconfirmed (thedroidyouarelookingfor; aggregators). The exact mAh figure is listed as NOT FOUND in the gated fact base and is unclaimed here.
Vector 2.0 battery compartment: UNVERIFIED. Community notes describe a redesigned battery compartment and a “more reliable chassis” in the 2.0 hardware revision (ankicozmorobot), but no technical detail of the redesign appears in any reachable source.
3.7.2 Charging dock and companion cube
The standard retail package includes a charging dock and a companion cube (iFixit; wevolver; anki.bot). The charging dock is a contact charger: the robot reverses onto the dock’s charging contacts autonomously. The companion cube is a small blinkered block with embedded LEDs that Vector can recognize, interact with, and carry on its lift arm; the cube’s LED patterns serve as an expressive feedback channel during interactions and are part of the robot’s designed personality repertoire. The community Python SDK and the ROS 2 wrapper both expose cube-detection and cube-interaction behavior through their APIs (Vol 7).
3.8 The hardware summary: confirmed vs unverified
The table below condenses the sourcing status of every hardware attribute covered in this volume, using the same structure as Vol 1’s headline facts table.
Table 1 — The hardware summary: confirmed vs unverified
| Component | Attribute | Value | Confidence / Source |
|---|---|---|---|
| CPU | Model | Qualcomm Snapdragon APQ8009 | confirmed, community — not factory doc (thedroidyouarelookingfor; wevolver; Kinvert) |
| CPU | Architecture | Quad-core ARM Cortex-A7 | confirmed, community (same sources) |
| CPU | Rated clock | 1.2 GHz | confirmed, community (same sources) |
| CPU | Default / unlock clocks | 533 MHz / ~1.3 GHz | UNVERIFIED — single community source |
| OS | Base | Yocto / embedded Linux | confirmed (thedroidyouarelookingfor; wevolver) |
| RAM | Capacity | — | NOT FOUND — unclaimed |
| Storage | Capacity | — | NOT FOUND — unclaimed |
| Camera (2.0) | Resolution | 2 MP | confirmed (anki.bot; wevolver; ankicozmorobot) |
| Camera (2.0) | Field of view | 120° ultra-wide | confirmed (same sources) |
| Camera (original) | Resolution | HD/720p vs 1080p | CONFLICT — both cited; not resolved |
| Camera | Sensor part number | — | NOT FOUND — unclaimed |
| Display | Type | High-resolution color IPS | confirmed (anki.bot; iFixit) |
| Display | Resolution | 184 × 96 px | UNVERIFIED — single teardown source (Kinvert) |
| Microphones | Count / type | Four-mic beamforming array | confirmed (wevolver; anki.bot) |
| ToF scanner | Presence | IR laser distance scanner | confirmed (wevolver; anki.bot) |
| ToF scanner | Range | — | NOT FOUND — unclaimed |
| Cliff sensors | Count | 4 infrared drop sensors | confirmed (wevolver; iFixit) |
| Touch | Type | Capacitive top surface | confirmed (wevolver; iFixit; anki.bot) |
| IMU | Axes | 6-axis (accel + gyro) | confirmed (wevolver; Kinvert) |
| Wi-Fi | Band | 2.4 GHz single-band | confirmed (wevolver; anki.bot) |
| Bluetooth | Role | Initial setup / pairing | confirmed (wevolver; anki.bot; wire-pod wiki) |
| Motors | Type | DC motors | confirmed (wevolver; Fictiv teardown) |
| Treads | Drive gear | ~45-tooth internal gears | confirmed, community (wevolver; Fictiv) |
| Battery | Chemistry | Lithium-polymer | confirmed (thedroidyouarelookingfor; community aggregators) |
| Battery | Runtime | ~30–40 minutes | confirmed (thedroidyouarelookingfor; aggregators) |
| Battery | Capacity (mAh) | — | NOT FOUND — unclaimed (aftermarket ~500–600 mAh, UNVERIFIED) |
| Battery | 2.0 compartment | Redesign reported | UNVERIFIED (ankicozmorobot) |
| Lift arm | Type | Forklift-style, DC-motor-driven | confirmed (iFixit; wevolver; anki.bot) |
| Companion cube | Included | Yes, in retail package | confirmed (iFixit; wevolver; anki.bot) |
| Dimensions | All axes | — | NOT FOUND — unclaimed (~3.9 × 2.4 × 2.7 in UNVERIFIED) |
| Weight | — | — | NOT FOUND — unclaimed (~159 g UNVERIFIED) |
3.9 What is not known: the unclaimed items
Several hardware specifications are absent from every source reachable for this dive. They are listed explicitly here so that future passes — and readers consulting this volume alongside other references — know what has been searched for and not found, rather than merely omitted:
- Exact RAM: no figure confirmed by any reachable source.
- Exact storage capacity: the partition layout is described as Android-like; no size figure is stated.
- ToF sensor range: not stated in any product material, teardown, or community note reachable for this dive.
- Official battery capacity (mAh): aftermarket listings suggest approximately 500–600 mAh; no factory figure is confirmed.
- Camera sensor part number: absent from all reachable product and teardown materials.
- Exact dimensions and weight: the commonly cited ~3.9 × 2.4 × 2.7 in and ~159 g are treated as UNVERIFIED until a primary source confirms them.
- Motor gear ratios: teardowns confirm ~45-tooth drive gears; full ratio chains are not documented in any reachable source.
- IMU part number and full-scale ranges: not stated in any reachable source.
The Vector Technical Reference Manual (randym32.github.io/Vector-TRM.pdf) is the
explicitly flagged best candidate for resolving these gaps. It is a 543-page document
downloaded at 6.7 MB but not text-extractable in the environment used to compile the
sourcing notes.
3.10 Cross-reference: Vol 4
The compute platform and sensor suite documented here sit at the intersection of two operating regimes — onboard and cloud — that are covered in detail in Vol 4 (Original Cloud and Voice Stack). The brief orientation: navigation, cliff detection, face detection, IMU processing, animation, and autonomous dock-return all ran locally on the Snapdragon from launch; they did not depend on the cloud and do not break when the cloud is gone. The “Hey Vector” wake-phrase detection is likewise understood to have run onboard, though no reachable source documents the exact algorithm or a dedicated detection processor — this on-robot detection stage is an architectural inference (Vol 4). What required the cloud was the step beyond detection: converting the captured utterance into a recognised intent, routing it through a knowledge graph, and returning a meaningful answer. That architecture — and exactly what the cloud shutdown severed — is the subject of Vol 4.
Sources
- wevolver.com, “Vector 2.0 AI Robot Companion” — sensor suite, Wi-Fi, connectivity, DC motors, confirmed hardware specs across multiple attributes.
- anki.bot, “Meet Vector” (live as Digital Dream Labs / ANKI) — camera 2 MP / 120°, color IPS display, four-mic beamforming, Bluetooth, confirmed product descriptions.
- wiki.thedroidyouarelookingfor.info — community technical wiki: Snapdragon APQ8009 identification, Yocto OS, battery runtime; the UNVERIFIED 533 MHz / ~1.3 GHz clock detail originates here.
- Kinvert, “What’s Inside Anki Vector Hardware” (kinvert.com/whats-inside-anki-vector-hardware/) — teardown source for APQ8009 identification, 6-axis IMU, and the UNVERIFIED 184 × 96 display resolution. Photo in Figure 2 is personal reference only; verify before redistribution.
- iFixit, “Anki Vector” device page — cliff sensors, capacitive touch, charging dock, lift arm.
- ankicozmorobot.com, “Vector Robot” — camera 2 MP / 120° confirmed for 2.0; camera upgrade between 1.0 and 2.0 confirmed; battery compartment redesign UNVERIFIED.
- Fictiv teardown (via wevolver aggregation) — ~45-tooth tread drive gear.
- wire-pod wiki, “Installation” — Bluetooth initial-setup requirement.
- randym32.github.io/Vector-TRM.pdf — 543-page Vector Technical Reference Manual; downloaded (6.7 MB) but not text-extractable; flagged as the best route to confirmed RAM, storage, ToF range, and battery mAh.
- Full gated fact base with confirmed/unverified markers and source reachability:
02-inputs/vector_sourcing_notes.md.