Anki Vector 2 0 · Volume 9
Cheatsheet — Vector Quick Reference
A dense quick-reference distilled from Vols 1–8. Every row is sourced in the volume it
comes from; nothing new is introduced here. Each hard fact is marked C (confirmed by a
reachable primary/authoritative source) or U (unverified — community-reported or
single-secondary); items no reachable source pins down are shown as NF (not found,
left unclaimed). The full gated fact base with source URLs is
02-inputs/vector_sourcing_notes.md.
9.1 At a glance
Table 1 — At a glance
| Attribute | Value | Conf. |
|---|---|---|
| What | Palm-sized autonomous desktop companion (“robot pet”); treads, lift arm, IPS face | C |
| Maker | Anki (2018) → Digital Dream Labs (acq. Dec 2019) | C |
| Released | October 2018 (Oct 12 vs Oct 13 — sources conflict) | C |
| Lineage | Successor to Cozmo (2016) | C |
| Wake phrase | ”Hey Vector” (English only) | C |
| Processor | Qualcomm Snapdragon APQ8009, quad-core ARM Cortex-A7, 1.2 GHz | C (community) |
| OS | Yocto / embedded Linux | C |
| RAM / storage | not stated in any reachable source | NF |
| Camera | 2 MP, 120° FOV (Vector 2.0); original HD/720p vs 1080p disputed | C / conflict |
| Display | high-resolution colour IPS “face”; 184×96 per one teardown | C / U |
| Mics | four-microphone beamforming array | C |
| Distance | IR time-of-flight laser scanner (range not stated) | C / range NF |
| Other sensors | 4 cliff/drop, capacitive touch, 6-axis IMU | C |
| Connectivity | Wi-Fi 2.4 GHz single-band; Bluetooth for setup (no Wi-Fi 6) | C |
| Drive | DC motors, treaded wheels (~45-tooth gears) | C |
| Battery | Li-poly; ~30–40 min runtime; returns to dock | C; capacity NF/U |
| Dimensions / weight | ~3.9 × 2.4 × 2.7 in / ~159 g commonly cited | U (not in reachable sources) |
| Accessories | charging dock; companion cube | C |
9.2 Sensor suite (Vol 3)
Front-facing 2 MP / 120° camera (in the face display) · 4-mic beamforming array (top) · IR/ToF laser distance scanner (front) · 4 cliff/drop sensors (underside) · capacitive touch (top surface) · 6-axis IMU (accel + gyro). Exact ToF range, RAM, storage, and battery mAh are not in any reachable source — left unclaimed. The 543-page Vector Technical Reference Manual is the likely route to those figures.
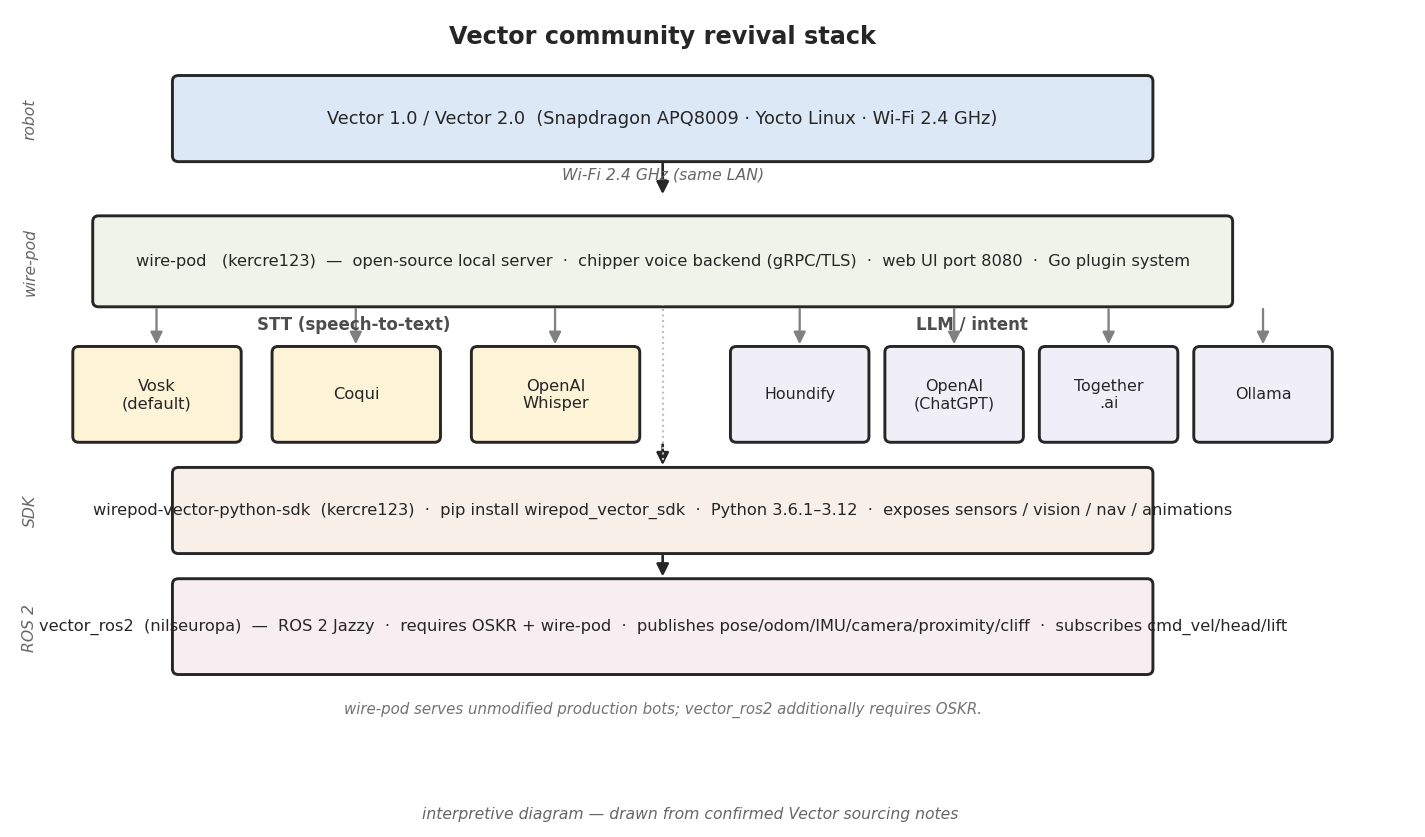
9.3 The revival stack (Vols 4–7)
Table 2 — The revival stack (Vols 4–7)
| Layer | What | Key facts | Conf. |
|---|---|---|---|
| Original cloud | ”Hey Vector” voice/NLP + Alexa, ran in Anki/DDL cloud | dead to community mid-2023; officially shut Jan 2024 | C |
| Open-sourced cloud | vector-cloud (vic-cloud + vic-gateway) + chipper | chipper = gRPC/TLS, MIT, ProcessIntent, no built-in STT | C |
| OSKR | DDL kit: keys + bootloader → production-to-”Dev” robot | one-time fee, 5 licenses; DDL can’t issue keys since mid-2023; price NF | C |
| wire-pod | free OSS local server replacing the cloud on retail bots | needs “ep” firmware on production bots; web UI port 8080 | C |
| · STT | swappable | Vosk (default) · Coqui · OpenAI Whisper | C |
| · LLM/intent | swappable | Houndify · OpenAI (ChatGPT) · Together.ai · Ollama | C |
| Python SDK | wirepod-vector-python-sdk | pip install wirepod_vector_sdk; Python 3.6.1–3.12; exposes sensors/vision/nav/animations | C |
| ROS 2 | vector_ros2 (nilseuropa) | ROS 2 Jazzy; requires OSKR + wire-pod; colcon build | C |
Key distinction: wire-pod runs on an unmodified production Vector (it needs only the
“ep” firmware variant), while vector_ros2 requires OSKR. wire-pod is for cloud
replacement; OSKR is the deeper unlock for developer/ROS-grade access.
9.4 Repositories
Table 3 — Repositories
| Repo | Purpose |
|---|---|
| github.com/kercre123/wire-pod | the local cloud-replacement server (centerpiece) |
| github.com/kercre123/wirepod-vector-python-sdk | community Python SDK (PyPI wirepod-vector-sdk) |
| github.com/nilseuropa/vector_ros2 | ROS 2 Jazzy wrapper (requires OSKR + wire-pod) |
| github.com/digital-dream-labs | DDL: OSKR, vector-cloud, chipper, owner’s manual |
| personalrobots.biz/vector-escape-pod-and-open-source-kit | Escape Pod + OSKR explainer |
| wiki.thedroidyouarelookingfor.info | community technical wiki |
SDK fork chain: Anki → cyb3rdog → MoonDog83 → kercre123. vector_ros2 topics: publishes
pose/odom/IMU/battery/camera/proximity/touch/cliff/joint-states/occupancy-grid;
subscribes cmd_vel + head/lift; 6 services (explore, fetch cube, dock, animation, TTS;
the 6th is unnamed in sources).
9.5 Revival path in brief (Vol 8)
Acquire a used unit → set up wire-pod (free; replaces the dead cloud) → optionally
OSKR-unlock → drive it with the Python SDK / ROS 2. wire-pod alone restores
voice on an unmodified bot; OSKR + vector_ros2 is the developer/autonomy path.
9.6 SKU & price map (Vol 8)
Table 4 — SKU & price map (Vol 8)
| Item | Price | Conf. |
|---|---|---|
| Cozmo (predecessor) | ~$180 launch | C |
| Vector (original, per-color SKUs) | Black $199.99 / Pink $219.99 / Blue $249.99 / Red $299 | U (single secondary) |
| Vector 2.0 | ~$400 commonly cited | C |
| Used market | ~$200–350 typical | C/U |
| DDL subscription | ~$74.99/yr per secondary listings | U |
| Escape Pod | $99 one-time (wire-pod is the free equivalent) | U |
| OSKR kit | price not found | NF |
9.7 Vendor status (Vols 2, 8)
Anki bankrupt end-April 2019 → DDL acquired Dec 2019 → relaunched 2021 → cloud dead mid-2023/Jan 2024 → Sept 18 2024 PA AG (Michelle Henry) lawsuit over ~14,000 unfilled prepaid orders, $4M+ (vs $2M+ in some headlines), outcome unknown. anki.bot lists Vector 2.0 but reports “sold out”; buy used, not direct. The 2026 “Anki is back” headline is unverified and contradicted — treat as unconfirmed.
9.8 Firmware / version gotchas
- Production bots need the “ep” firmware variant for wire-pod.
- OSKR is required for
vector_ros2(and full developer firmware), not for basic cloud replacement. - DDL has been unable to issue OSKR keys/firmware since mid-2023 — a real caveat for anyone seeking OSKR today.
- Original-camera resolution (HD/720p vs 1080p) is disputed; Vector 2.0 is firmly 2 MP.
9.9 Hub contrast (one row)
Table 5 — Hub contrast (one row)
| HERO Jr (1984) | Vector (2018) | |
|---|---|---|
| Kept alive by | hardware spares + restoration | an open local server (wire-pod) — software, not hardware |
Fuller cross-robot matrix: _shared/comparison.md.
Sources
This cheatsheet introduces no new claims; each row traces to its volume (Vols 1–8) and,
through them, to the gated fact base 02-inputs/vector_sourcing_notes.md. Primary anchors:
github.com/kercre123/wire-pod (and its wiki); github.com/digital-dream-labs (OSKR,
vector-cloud, chipper); github.com/kercre123/wirepod-vector-python-sdk;
github.com/nilseuropa/vector_ros2; personalrobots.biz; wiki.thedroidyouarelookingfor.info;
Wikipedia “Anki (American company)”; The Robot Report; PRNewswire; CBS News Pittsburgh;
wevolver; Kinvert; iFixit; anki.bot.