Heathkit HERO Jr (RT-1) · Volume 3
Drive & Locomotion — A Rear-Driven Tricycle with a Fixed Head
3.1 The three-wheel base
The HERO Jr moves on three wheels: two that are fixed and one steerable drive
wheel. The steerable wheel is the single powered, single steered wheel — it both
propels the robot and points it — while the other two simply roll and carry load.
This is the classic tricycle layout, and it lets one motor-and-steering assembly
do the work that a two-motor differential drive would otherwise split between two
sides (HERO FAQ, hero.dsavage.net; theoldrobots.com).
What makes the HERO Jr’s version of the layout distinctive is where the steerable drive wheel sits: at the rear of the chassis. The two fixed wheels are at the front, the drive-and-steer wheel trails behind, and the whole machine is — in the words of the HERO FAQ — built so that “HERO Jr drives backwards to HERO 1” (HERO FAQ; theoldrobots.com). The HERO 1, documented in its own deep dive, carries its steerable drive wheel at the front; the HERO Jr mirrors that geometry front-to-back.
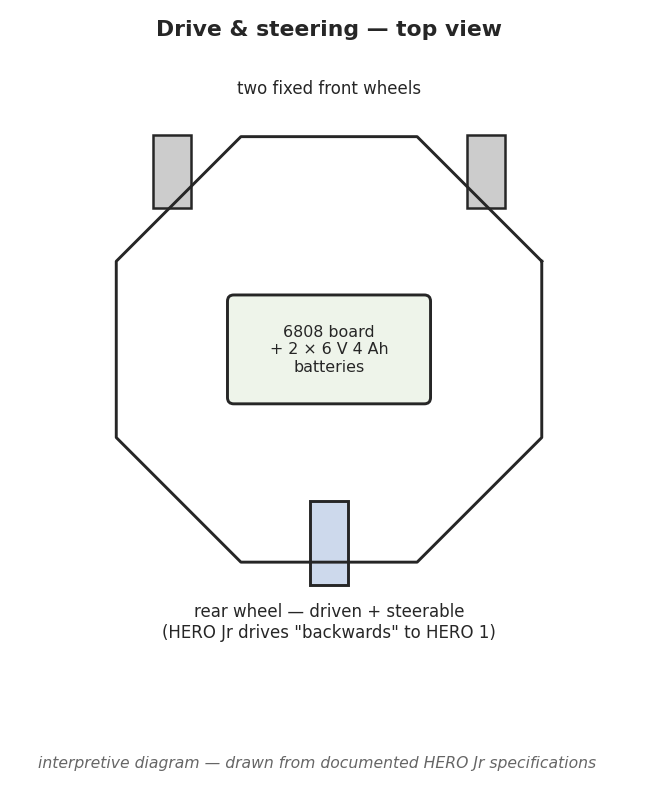
The base supports a body that stands 19 inches tall (theoldrobots.com; HERO FAQ) and runs from a pair of internal rechargeable batteries — two 6 V 4.0 Ah cells giving roughly four hours of normal exploring, with the electrical detail of the power system covered in Vol. 2 (theoldrobots.com). For locomotion the point that matters is that everything the robot does on the floor — roaming, turning, backing out of a corner, carrying a load — is mediated through that one rear wheel.
3.2 Rear drive — “drives backwards to HERO 1”
Putting the powered, steered wheel at the rear has consequences that ripple through how the machine behaves. In a rear-steer tricycle the driven wheel pushes the chassis from behind and swings to one side to set a heading; the two passive front wheels define the pivot the body turns about. The HERO FAQ and theoldrobots.com both record the rear placement and the “drives backwards to HERO 1” framing, but neither source documents the turn geometry, the steering range, the wheel diameter, or the gearing — so those numbers are left explicitly unclaimed here rather than reconstructed. The figure above shows the documented topology (which wheel drives, which steer, where each sits) and nothing finer.
The reason the contrast with the HERO 1 is worth stating is that it is the clearest single illustration of how the HERO Jr was re-aimed rather than merely cut down. The HERO 1 was an educational machine whose front-steer drive was one more thing a student could measure and program; the HERO Jr inherited the same idea of a single steerable drive wheel but flipped its position, an arrangement the surviving secondary record reports without explaining the engineering motive (HERO FAQ; theoldrobots.com). What can be said with confidence is the qualitative result: a compact one-wheel-drives-and-steers base that a consumer division could build cheaply and that needs only one drive path to roam a living-room floor.
3.3 The fixed head — what it saves and what it costs
The HERO Jr’s head does not rotate (HERO FAQ). This is one of the defining
simplifications that separate it from the HERO 1, whose head sweeps through
350° to aim its sonar and other sensors independently of the body (see the
HERO 1 deep dive and _shared/comparison.md). On the HERO Jr the head is fixed to
the body: the sensors it carries — the Polaroid ultrasonic sonar, the light
sensor, and the sound sensor detailed in Vol. 4 — all point wherever the body is
pointing, and they cannot be re-aimed on their own.
What the fixed head saves is real. A rotating head needs a head-turn motor, a position-feedback path so the robot knows where the head is looking, the mechanical neck to carry the rotation, and the wiring to pass signals across a moving joint — all of it cost, parts count, weight, and failure surface. Deleting the head rotation removes that entire subsystem, which is exactly the kind of expense a home-market robot at roughly $600 (Vol. 1) could not justify when its job was to roam and react rather than to teach servo control.
What the fixed head costs is that the robot must turn its whole body to aim its sensors. Where a HERO 1 could hold position and pan its head to scan a room or to fix on a sound, the HERO Jr has to rotate the entire chassis on its tricycle base to look in a new direction — every change of “gaze” is a drive maneuver through the rear wheel. The sensing and the locomotion are therefore coupled: aiming is driving. Vol. 4 returns to this point from the sensor side; for locomotion the consequence is that the drive system carries the extra duty of orienting the sensor suite, not just transporting the robot.
3.4 Tracking its own motion
To do anything deliberate on the floor — drive a measured distance, complete a turn, or know that it has actually moved when commanded — a wheeled robot needs some way to sense its own motion. For the HERO Jr the firsthand retrospective at partofthething.com (Dilettante) documents a reflective wheel-motion sensor: shiny stickers placed on the wheels that an optical sensor reads as they pass, so the robot can track movement by counting the reflective marks going by (partofthething.com / Dilettante).
This is the simplest, cheapest form of wheel odometry — a reflective opto-interrupter watching marked wheels rather than a precision shaft encoder — and it fits the HERO Jr’s whole design philosophy of buying “good enough” sensing at consumer cost. It is attributed here specifically to the Dilettante retrospective; the factory primaries are not quoted for this detail, and the resolution of the sensor (how many marks per wheel, and therefore how finely it can measure distance or rotation) is not documented and is left unclaimed. Dilettante’s account also lists an obstruction sensor among the HERO Jr’s senses, covered alongside the rest of the sensor suite in Vol. 4. What matters for locomotion is that the rear-drive tricycle is a closed loop, not open-loop: the robot has feedback that it is moving, however coarse, rather than dead-reckoning blind.

3.5 The carry compartment — the “fetch a drink” trick
One of the demonstrations Heathkit built the HERO Jr around used its locomotion for a concrete, domestic task: carrying something across a room. The robot has a compartment in its body rated to hold up to 10 pounds of payload in 94 cubic inches of space (theoldrobots.com; HERO FAQ). The often-cited image is the robot fetching a drink — rolling from one place to another with a glass aboard — and the compartment is what makes that more than a stunt: a defined, load-rated cargo volume rather than an improvised tray.
Ten pounds is a meaningful load for a 19-inch home robot, and the fact that the drive base is rated to move it is itself a statement about the tricycle layout: the two fixed wheels carry and stabilize the load while the single rear wheel supplies the push and the steering. The compartment turns the HERO Jr’s locomotion into a transport capability, the most directly useful thing a roaming home robot of 1984 could do, and the one most often shown off. The dimensions and internal shape of the compartment beyond the 94-cubic-inch / 10-pound rating are not documented in the consulted record and are not reconstructed here.
3.6 What the locomotion record does and does not settle
For a reader consulting the factory documents, the locomotion picture the secondary record supports is deliberately bounded. The following are documented:
Table 1 — record supports is deliberately bounded. The following are documented
| Locomotion fact | Value | Source |
|---|---|---|
| Wheel layout | Three wheels — two fixed, one steerable drive wheel | HERO FAQ; theoldrobots.com |
| Drive-wheel position | At the rear (“drives backwards to HERO 1”) | HERO FAQ; theoldrobots.com |
| Head | Fixed — does not rotate (contrast HERO 1’s 350°) | HERO FAQ |
| Motion tracking | Reflective wheel-motion sensor (shiny stickers on the wheels) | partofthething.com / Dilettante |
| Payload | Up to 10 lb in a 94-cubic-inch compartment | theoldrobots.com; HERO FAQ |
| Height | 19 inches | theoldrobots.com; HERO FAQ |
The following are explicitly unclaimed because the consulted sources do not record them: the drive and steering motor part numbers; the wheel diameter; the gear ratio; the steering range and the turn geometry; the speed; and the resolution of the reflective wheel-motion sensor. The HERO Jr Owner’s Guide and Programmer’s Guide (freely available via the Internet Archive) are the documents a restorer should consult for any of these mechanical specifics; this volume reports only what the cross-verified record establishes and does not invent the steering mechanism.
In sum, the HERO Jr’s locomotion is the consumer-economics version of a mobile robot base: one rear wheel that both drives and steers, two fixed wheels to carry and stabilize, a fixed head that trades independent sensor aiming for a whole subsystem’s worth of saved cost, a reflective sticker odometer for coarse motion feedback, and a load-rated compartment that turns roaming into the one trick a 1984 living-room robot most wanted to show — fetching a drink across the room. The hardware that surrounds this base — the 6808, memory, and power — is Vol. 2; the sensors the fixed head must be steered to aim are Vol. 4.
Comments (0)