Heathkit HERO Jr (RT-1) · Volume 4
Sensing — Polaroid Sonar, Light, Sound, and Optional IR
4.1 What the HERO Jr senses
The HERO Jr perceives its surroundings through a small cluster of sensors carried
in its head: an ultrasonic sonar for ranging, a light sensor, and a sound sensor.
An infrared motion detector can be added as a factory accessory. This is a
deliberately modest suite next to the HERO 1’s, and like everything else on the
robot it was shaped by the consumer brief — enough sensing to let the machine
roam a living room, react to a hand-clap or a light switch, and notice an
intruder, but no more (HERO FAQ, hero.dsavage.net; theoldrobots.com).
Three of those sensors are visible on the front of the robot’s head, because Heathkit silkscreened their function straight onto the red face panel. The unit photograph below carries three labels — I.R. MOTION DETECTOR, SONAR SENSOR, and LIGHT SENSOR — which both names the sensors and tells the owner where the robot is “looking” from (visible in the Marshall Astor photograph, below).
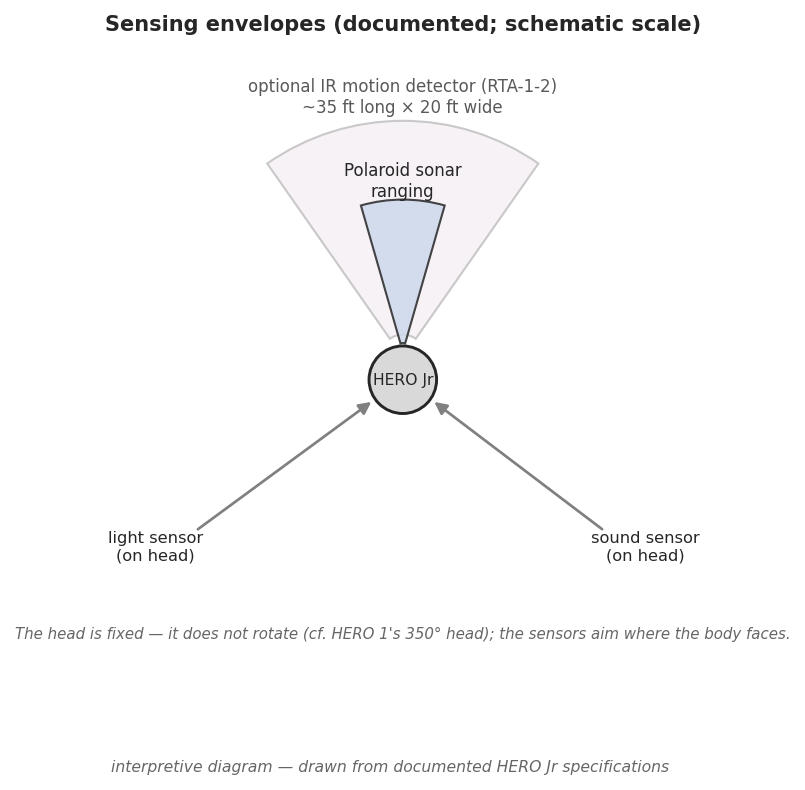
4.2 The fixed head — sensing aims where the body faces
Before the individual sensors, one structural fact governs all of them: the
HERO Jr’s head does not rotate (HERO FAQ). This is the single sharpest break
from the HERO 1, whose head sweeps roughly 350° and can therefore aim its sonar
and light sensors independently of the body (see the HERO 1 deep dive; a
cross-robot matrix sits in _shared/comparison.md).
On the HERO Jr the head is fixed to the body, so every sensor in the cluster points wherever the body is pointed. To aim the sonar at a different part of the room, the robot must turn its whole chassis. That places the sensing problem and the steering problem in the same frame: the robot perceives along its line of travel, and re-aiming means re-driving. The rear-driven three-wheel base that does that turning — two fixed wheels and a single steerable drive wheel at the rear — is covered in Vol 3 (Drive & Locomotion); the relevant consequence here is simply that the head and the heading are locked together. Where the HERO 1 could stand still and look around, the HERO Jr looks by moving (HERO FAQ; theoldrobots.com).
This is a cost-and-complexity decision of a piece with the rest of the design. Dropping the head’s pan mechanism removes a motor, its drive, its position feedback, and the wiring to carry a movable sensor harness across a rotating joint — real expense and real failure surface, traded away for a robot that senses straight ahead. For a machine meant to roam and react rather than inspect and manipulate, the trade reads as reasonable, and it is consistent with the armless, simplified body described in Vol 1.
4.3 The Polaroid ultrasonic sonar
The HERO Jr’s primary ranging sense is an ultrasonic sonar built on the Polaroid ultrasonic ranging system — the same family of electrostatic transducer-and-driver that Polaroid developed for autofocus cameras and that was widely adopted by hobby and research robots of the era, including the HERO 1 (HERO FAQ; theoldrobots.com). The transducer emits a burst of ultrasound and times the returning echo; the round-trip time gives the distance to the nearest reflecting surface ahead.
What the secondary record establishes for the HERO Jr is the sensor’s identity and its placement — a Polaroid-type ultrasonic ranging sensor in the head, facing forward — not a calibrated specification sheet. In particular, the maximum range, beam width, and update rate of the HERO Jr’s sonar are not stated in the secondary sources consulted here. Those figures are not asserted in this volume; a reader who needs them should consult the HERO Jr Owner’s Guide, which is the authoritative primary for the as-built sensor. The sonar’s function on the robot is qualitative and well attested even where the numbers are not: it is what lets the HERO Jr detect a wall or a person in its path and stop, turn, or react rather than drive into it (HERO FAQ).
The Polaroid module is a sensible choice for this role. Ultrasonic ranging is cheap, needs no contact, works in the dark, and returns an actual distance rather than a mere proximity flag — exactly what a roaming robot needs to keep from bumping the furniture. Its known weaknesses are the familiar ones of the technology and apply here by inference rather than by documented test: soft or angled surfaces can scatter the echo, and the beam covers a cone rather than a pencil line, so the range returned is to the nearest thing anywhere in that cone. The volume does not claim HERO Jr-specific measurements of either effect.
4.4 The light sensor
A light sensor in the head lets the HERO Jr respond to the ambient light level and to changes in it (HERO FAQ; theoldrobots.com). The secondary record documents the sensor’s presence and its general purpose — sensing light — but does not specify its type, spectral response, or thresholds, and none of those are invented here. Functionally, a light sense is what lets a personality program react to a room going dark or a lamp switching on; the behaviour side of that — which personality keys use it, and how — belongs to Vol 5 (Speech & Personality), which covers the ROM-resident programs that consume the sensor inputs. The detail of the light sensor’s electrical specification is deferred to the Owner’s Guide.
4.5 The sound sensor
The HERO Jr also carries a sound sensor — in effect a microphone front end that lets the robot detect sound in the room, such as a clap or a voice (HERO FAQ; theoldrobots.com). As with the light sensor, the secondary sources establish that the sensor exists and what it is for, but do not give its sensitivity, frequency response, or triggering threshold; this volume does not supply those numbers. The sound sense pairs naturally with the built-in speech: a robot that can both hear a sound and answer with the Votrax voice (Vol 5) is the basis for the call-and-response feel the personality programs aim at. Again, the behavioural use of the sound input is Vol 5’s subject; the as-built sensor specification is the Owner’s Guide’s.
4.6 The optional infrared motion detector (RTA-1-2)
The fourth sensor named on the front panel — I.R. MOTION DETECTOR — is not standard. It is a factory accessory, the RTA-1-2 infrared motion detector, which the owner adds to give the robot a sense it does not ship with (theoldrobots.com). Its presence as a label on every unit’s face panel, ahead of the sensor actually being fitted, tells you Heathkit designed the head around the option from the start: the silkscreen reserves the position whether or not the part is installed.
The RTA-1-2 is a passive-style infrared motion detector with a documented coverage field of roughly 35 feet long by 20 feet wide (theoldrobots.com). That broad fan makes it a watch sensor rather than a navigation one: it does not range or steer, it reports that something warm moved within a wide zone in front of the robot. That is exactly the input a guard-type behaviour wants — the robot sits still and the IR field, not the sonar, is what notices the intruder. The accessory and its place in the wider RTA expansion line are catalogued in Vol 7 (Cartridges & Accessories); the point here is that motion sensing on the HERO Jr is an add-on layered onto the standard light/sound/sonar core.
4.7 Dilettante’s additional sensors
A firsthand retrospective of a working HERO Jr by the author of the partofthething.com “Dilettante” write-up describes two sensing capabilities beyond the standard head cluster, attributed here to that source.
First, Dilettante lists an obstruction sensor — a means for the robot to detect an obstacle in its path beyond the forward sonar return (Dilettante, partofthething.com). The secondary record’s detail on this sensor is limited; this volume reports its existence per Dilettante and does not assert its operating principle or specification beyond that.
Second, Dilettante describes a reflective wheel-motion sensor: shiny stickers applied to the wheels, read by a reflective optical sensor, so the robot can tell how far and how fast its wheels have actually turned (Dilettante). This is the HERO Jr’s odometry — its feedback that commanded motion really happened — and because it reads the wheels it belongs to the drive side of the machine. It is covered in its mechanical context in Vol 3 (Drive & Locomotion) and noted here only so the sensing picture is complete: the robot’s sense of its own motion comes from this drive-side reflective sensor, distinct from the head cluster that senses the outside world. Both wheel-motion details are attributed to Dilettante rather than to the factory documentation.
4.8 The sensor suite at a glance
The table gates each sensor to where it is documented. Where a column would require a number the secondary record does not give, it is marked not specified rather than filled with an invented value.
Table 1 — The sensor suite at a glance
| Sensor | Documented spec | Source |
|---|---|---|
| Ultrasonic sonar | Polaroid ultrasonic ranging type, head-mounted, forward-facing; range/beam not specified in secondary record (defer to Owner’s Guide) | HERO FAQ; theoldrobots.com |
| Light sensor | Present in head; senses ambient light; type/thresholds not specified | HERO FAQ; theoldrobots.com |
| Sound sensor | Present in head; detects room sound; sensitivity/response not specified | HERO FAQ; theoldrobots.com |
| IR motion detector (optional) | Accessory RTA-1-2; coverage field ~35 ft long × 20 ft wide | theoldrobots.com |
| Obstruction sensor | Listed as an additional obstacle sense; principle not detailed | Dilettante (partofthething.com) |
| Wheel-motion sensor | Reflective optical sensor reading shiny wheel stickers (drive-side odometry; see Vol 3) | Dilettante (partofthething.com) |
| Head aiming | Fixed head — all head sensors aim where the body faces (contrast HERO 1’s ~350° head) | HERO FAQ |
4.9 The labelled panel as primary evidence
The strongest single confirmation of the standard sensor set is the robot itself. The front of the HERO Jr’s head is a red panel onto which Heathkit silkscreened the three sensor functions — I.R. MOTION DETECTOR, SONAR SENSOR, and LIGHT SENSOR — reading down the face. Those labels appear plainly in the unit photograph below and corroborate the secondary listing of sonar, light, and (optional) infrared at the documented positions. The sound sensor is part of the same head cluster but is not among the three silkscreened front-panel labels.

4.10 How the sensing fits the rest of the robot
The sensing suite is the input half of the HERO Jr’s reactive loop, and it is sized to match the output half. The standard sonar, light, and sound sensors give the ROM-resident personality programs (Vol 5) just enough to roam, avoid, and react: the sonar keeps the robot off the walls, the light and sound senses give it cues to respond to, and the Votrax voice answers. The optional RTA-1-2 adds a wide motion field for guard-style behaviour, and Dilettante’s wheel-motion sensor closes the drive loop so commanded movement can be verified (Vol 3).
What the suite does not do is also informative. There is no rotating head to decouple sensing from heading, no manipulator to need fine-grained proximity or touch sensing, and — in the standard configuration — no motion detector at all. Each omission tracks a cost the home buyer would not pay for, and each is consistent with the re-aimed-not-cut-down reading of the robot set out in Vol 1. Throughout, the precise electrical and range specifications of the as-built sensors are matters for the HERO Jr Owner’s Guide, the authoritative primary; this volume reports what the secondary record documents and leaves the rest explicitly unclaimed.
Comments (0)