RoboDog · Volume 1
Introduction & the RoboDog Program
RoboDog is a from-scratch quadruped robot project with a specific end-state in mind: a fully autonomous, all-weather security dog that patrols a residential property in Michigan the way a trained guard dog does — independently, at night, in snow, on uneven ground, up and down stairs. Getting there is not a single build. It is a three-tier progressive ladder, each rung a real and functional machine that teaches toward the next. This survey — eleven volumes — maps the existing ecosystem of kits, open-source builds, and component technologies so the design decisions in later phases rest on researched ground rather than assumption. This first volume sets the mission, the design targets, the build philosophy, and the structure of the survey that follows.
1.1 The vision
The RoboDog program targets a single concrete mission: autonomous property patrol as a security dog. The robot operates without a handler on site, traversing a defined outdoor perimeter — lawn, gravel, fence-lines, driveway, porch stairs — detecting persons and vehicles, transmitting alerts over WiFi, and returning to its charging station when battery is low. The owner is not watching a live feed and actively guiding the robot; the robot decides where to walk, what to flag, and when to recharge.
That mission is deliberately modeled on what commercial systems do today. Boston Dynamics’ Spot, outfitted with Asylon’s PupPack sensor suite (20× optical-zoom thermal camera, AES-256 LTE uplink, on-board AI classifier for people/animals/vehicles), had completed more than 250,000 autonomous patrol missions covering over 240,000 km by April 2026 [3]. The full commercial DroneDog system — robot, sensor pack, weatherproof docking station, and remote monitoring subscription — costs upward of $150,000 [2], compared to roughly $250,000 per year for a single 24/7 human security officer. The mission is real, the commercial category exists, and the technology is well-understood. RoboDog’s goal is to replicate that capability at the scale of a private build, using a full machine shop, FDM printing, and custom electronics in place of a corporate supply chain.
The form factor target is a standing height roughly matching a small-to-medium Labrador retriever: approximately 20–24 inches at the shoulder. This is a negotiable starting point — actual leg geometry and actuator torque budgets (worked out in the build volumes) will set the final number — but it establishes a size class that is large enough to carry useful sensors and a payload back, and large enough that the gait dynamics are tractable on real outdoor terrain.
1.2 Design targets at a glance
The following table summarizes the program’s design targets as of the start of Phase 1. They are targets, not locked specifications; the survey is intended to stress-test each one against real-world constraints.
Table 1 — Design targets at a glance
| Parameter | Target |
|---|---|
| Standing height | ~20–24 in at the back (small-to-medium Labrador scale) — negotiable |
| Mission | Autonomous property patrol: SLAM + GPS waypoints, obstacle avoidance, person/vehicle detection, alerting |
| Autonomy target | Full autonomous patrol — phased in as teleop → assisted autonomy → full (so the program cannot dead-end) |
| Connectivity | WiFi + Bluetooth primary; cellular fallback considered |
| Payload back | Structural spine/deck as a bolt-on payload interface — power/data bus; carry pack, sensor mast, or other modules without chassis redesign |
| Operating terrain | Rough outdoor ground, slopes, stairs, all-weather / wet (IP-sealed), cold and snow (Michigan winters), night operation |
| Owner’s shop | FDM 3D printing (large-format) + full CNC machine shop (lathe, mill) + serious electronics bench |
The operating terrain column is the hard bar. Every design decision that trades against it — a chassis that cannot be IP-sealed, actuators that lose torque in sub-freezing grease, a battery chemistry that derates sharply in cold — is a trade that must be surfaced and accounted for. The honesty section below says more on this.
1.3 Why a quadruped
The mission demands outdoor mobility on terrain that defeats conventional robot platforms. Stairs, gravel, snow-covered slopes, and frost-heaved concrete are discontinuous surfaces; a wheeled robot that cannot step over a 15 cm obstacle is limited to maintained pathways. Tracked robots improve on wheels for loose or soft ground but still cannot negotiate stairs cleanly. Legged systems, in contrast, negotiate obstacles by choosing where each foot lands — a fundamental advantage on discontinuous terrain and stairs that wheeled systems lack entirely [1].
The trade-off is real: wheeled platforms are more efficient over flat ground and mechanically simpler to design. Hybrid wheeled-legged systems attempt to capture both advantages but introduce significant control complexity [1]. For a mission that must handle stairs, uneven lawn, gravel, and possibly porch steps, the terrain requirement drives the choice toward legs.
Among legged configurations, quadrupeds occupy the practical sweet spot. Bipeds require constant active balance and face higher fall risk on uneven ground with no ready recovery. Hexapods and higher-order systems carry more actuators than the mission demands and are harder to design from scratch. Quadrupeds offer four contact points, a well-understood range of static and dynamic gaits, and a mature ecosystem of commercial and open-source reference designs — from Boston Dynamics Spot [2] to Unitree’s consumer-grade line to the Stanford Pupper and MIT Mini-Cheetah DIY lineage. The survey (Vols 2–3) maps this ecosystem in full. The technology base is documented, the community is active, and the control software is increasingly open.
1.4 The three-build-ladder philosophy
RoboDog is built as three sequential tiers, each a real and functional deliverable. They are not three alternatives from which one is chosen; each one is built, tested, and used before the next begins, because each one teaches the skills and reveals the constraints that the next requires.
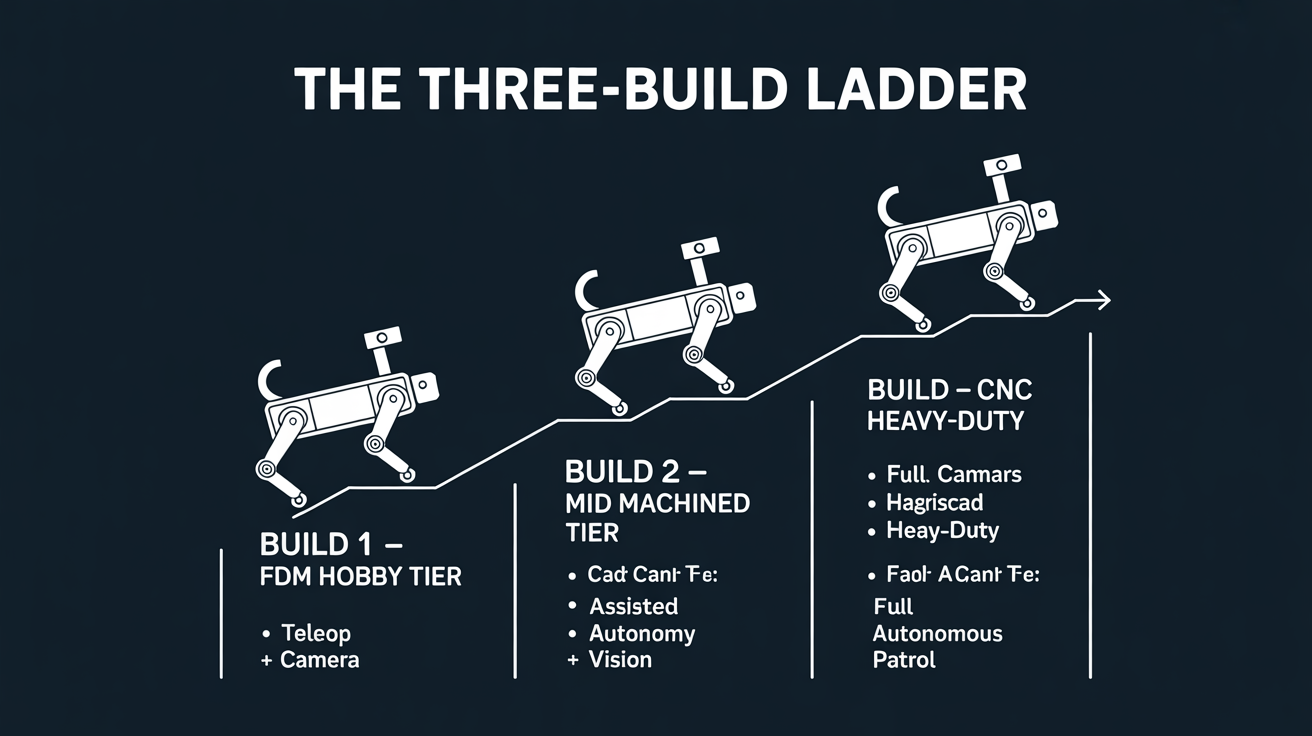
Build 1 — FDM hobby tier. The frame is printed in FDM plastic. Actuators are hobby or small smart serial servos. Compute is a Raspberry Pi or ESP32-class board. The robot is teleoperated with a live camera feed, and it walks on a flat indoor or sheltered surface. Its value is not as a patrol dog — it is as a working kinematic prototype. It proves out the leg geometry, the control software, the wiring architecture, and the build process before any machining happens. Every lesson about joint alignment, cable management, and gait tuning at this tier costs FDM plastic and time, not aluminum and actuator budget.
Build 2 — Mid machined tier. The frame transitions to a mix of FDM and machined parts. Actuators step up to quasi-direct-drive (QDD) brushless motors with integrated controllers — the class of actuator that MIT Mini-Cheetah and Unitree’s mid-range dogs use — providing real torque and proprioceptive feedback. Compute moves to Jetson-class (Orin Nano or NX). The robot gains assisted autonomy: ROS 2, basic navigation, obstacle avoidance, and a depth-camera vision pipeline. It operates outdoors on easy terrain. It is not yet the all-weather patrol dog, but it is a real legged robot that can be demonstrated and tested against mission fragments.
Build 3 — Full CNC heavy-duty finale. The full machined build. Actuators are high-torque, fully sealed. The chassis is machined aluminum, IP-sealed for wet and cold-weather operation. Compute runs the full autonomy stack: SLAM, GPS waypoints, Nav2, on-board person and vehicle detection, auto-return to a weatherproof charging dock, and night/thermal sensing. This is the Labrador-size security dog that patrols the owner’s property. It is the machine the program has been building toward.
The ladder structure means the program has a real deliverable at every tier and never bets everything on a single complex build. Build 1 fails fast and cheaply. Build 2 earns real outdoor field time. Build 3 completes the mission.
1.5 The operating envelope and a note on honesty
The hard operating envelope — rough outdoor terrain, stairs, all-weather wet, cold Michigan winters (temperatures regularly reaching −10 °C and below, with snow on the ground for months) [5], and unattended overnight patrol — is Spot-class ambition. Spot is designed and priced to match it [2][3]. Build 3 of RoboDog targets the same envelope.
Build 1 does not. An FDM-printed frame with hobby servo actuators is not IP-sealed. It does not climb stairs reliably. Its servos lose torque at sub-freezing temperatures, its battery chemistry derates in cold, and it carries neither the compute nor the sensor suite for autonomous outdoor navigation. To suggest otherwise would be to mislead, and this survey does not mislead.
Each volume of the survey will note, explicitly, where a technology choice hits a feasibility wall against the hard operating envelope. If a class of actuators cannot seal against water ingress, that is stated. If a compute platform cannot sustain a vision-and-navigation pipeline at the required frame rate, that is stated. The three-build ladder is designed so that none of those walls dead-ends the program — they redirect effort to the next tier — but they are real walls and the survey treats them honestly. The goal of Phase 1 is to map those walls before any part is designed, so that the Fusion 360 CAD and PCB work in Phase 2 starts with an accurate picture of the design space.
1.6 How this deep dive is organized
The survey consists of eleven volumes, authored sequentially so that the foundational material in early volumes informs the applied analysis in later ones.
Part I — Foundations (Vols 1–4)
- Vol 1 — Introduction & the RoboDog program (this volume): mission, targets, build philosophy, survey structure.
- Vol 2 — Quadruped robotics primer & taxonomy: a short history, leg anatomy, gaits, kinematics fundamentals, and actuation paradigms — the vocabulary the rest of the survey uses.
- Vol 3 — The landscape — what’s out there: a systematic survey of commercial kits (Unitree, Spot, DEEP Robotics, Petoi, Mini Pupper) and open-source DIY builds (Stanford Pupper, OpenDog, SpotMicro, Mini Pupper open edition), with comparison tables and a per-platform reading of what each teaches the build ladder.
- Vol 4 — Cross-cutting building blocks: the component-class reference — actuators, motor controllers, compute, sensors, power systems, communications, and materials — with decision tables and tradeoff notes that Vols 5–7 draw from.
Part II — The three builds (Vols 5–7)
- Vol 5 — Build 1: the FDM hobby tier: reference designs, BOM, honest capability limits, and the lessons that carry up.
- Vol 6 — Build 2: the mid machined tier: QDD actuators, mixed frame, Jetson compute, assisted autonomy.
- Vol 7 — Build 3: the full-CNC heavy-duty finale: the full mission build — torque budget, IP sealing, full autonomy stack, auto-charge, payload back.
Part III — Cross-cutting systems & synthesis (Vols 8–11)
- Vol 8 — The autonomy & vision stack: ROS 2, SLAM, Nav2, locomotion control, edge-AI perception — how the software grows from teleop to full patrol across the three tiers.
- Vol 9 — The modular payload back: spine/deck mechanical interface, electrical bus, connector standards, example payloads, and safety interlocks.
- Vol 10 — Power, thermal, weatherproofing & all-season operation: energy budget, battery design, IP sealing, cold-weather operation, and auto-charge dock.
- Vol 11 — Synthesis & the build roadmap: per-tier scorecard, feasibility-wall map, dependency graph, buy-vs-make guidance, risk register, and the Phase 2 handoff to Fusion 360 CAD and PCB design.
A final reconciliation pass (Task 13) cross-references all volumes, verifies internal consistency, and confirms publish-readiness. The survey will publish as a unit under the Robots hub at robots.fubsypoly.com after the RoboDog content folds into the hub repository and converts to the hub’s volume format.
Sources
- Margolis, G. et al. “Reinforcement Learning for Blind Stair Climbing with Legged and Wheeled-Legged Robots.” arXiv preprint arXiv:2402.06143v1 — legged robots: “while wheeled robots are efficient at traveling long distances, they lack the agility to traverse obstacles such as stairs; legged systems, in contrast, are more agile” (accessed 2026-06-18) https://arxiv.org/html/2402.06143v1
- “Boston Dynamics Spot robot dog gets AI power for nonstop surveillance.” Interesting Engineering, 2026-04-27 — Asylon DroneDog: 250,000+ autonomous missions, 240,000+ km, >$150,000 system cost, 90 min runtime, weatherproof auto-dock (accessed 2026-06-18) https://interestingengineering.com/ai-robotics/robot-guard-dogs-patrols
- “Boston Dynamics’ robot dog is now a 24/7 autonomous security guard.” GagaDget, 2026-04-28 — corroborates DroneDog all-weather autonomous patrol, 90 min runtime, remote RSOC override, 2024 RNC deployment (accessed 2026-06-18) https://gagadget.com/en/707130-boston-dynamics-robot-dog-is-now-a-247-autonomous-security-guard/
- “Boston Dynamics Robot Dog Spot: Price, Features, and Real-World Uses in 2025.” InRobots.shop — Spot base price ~$74,500; terrain capabilities: stairs, mud, gravel, industrial environments (accessed 2026-06-18) https://www.inrobots.shop/blogs/buyers-guide/boston-dynamics-robot-dog
- NOAA/NCEI 1991–2020 U.S. Climate Normals, station USW00094847 Detroit Metropolitan Airport MI — January mean daily minimum 19.2 °F (−7.1 °C); winter temperatures regularly reach −10 °C and below (accessed 2026-06-18) https://www.ncei.noaa.gov/data/normals-monthly/1991-2020/access/USW00094847.csv